| エレクトリック・デストロイヤー(開発中) | |
|---|---|
| 概要 |
難しいコースに入る手前でスピードを落とす機能があれば、フラットな部分ではもっと速度が出せる筈です。そこで、現在コースのどの部分にマシンがあるのか判断して、モーターを制御する実験を進めています。 走行距離センサと、加速度センサで、コース内での走行位置を把握し、状況に応じてトラクションを制御します。 |
| 構成 |

|
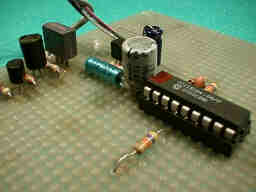
実験用として、ゆったり組んでいる為、基盤はやたら大きいです。モーターの制御は、色々な半導体を試しましたが、電圧が低いので、リレーが一番良い模様です。 |
|---|
| 走行距離センサ |

|
反射式フォトセンサをフロントシャフトの上部に組み込み、シャフトが6角形である事を利用して、車軸の回転に応じたパルスを得ています。 このパルスでCPUに割り込みを掛け、走行距離カウンタをインクリメントさせます。 |
|---|
| P板 |
|
CPUにPIC16C84を搭載して、各種処理を行います。 回路は驚く程簡単です。 |
|---|
| PIC-START |

|
この装置で、CPUにプログラムを焼き込みます。 |
|---|