|
マルチセグメント帰還制御付温熱抱き枕(DMX93) |
|
|---|---|
| 概要 |
前回製作した温熱抱き枕は、温度制御を行っていないために、適温に達するまでに長い時間を要しました。また、立ち上がりを改善するために出力を大きくすると、保温性の高い布団の中では、必要以上に温度が上昇するという不具合もありました。 そこで、今回は温度を帰還制御することで、これら問題を解決しています。 また、体の各部分を独立して温度制御することで、たとえば、腕が布団から出ていたので、冷たくなってしまう、といった現象を防いでいます。 さらに、単芯ステンレス電熱線に代えて、極細銅撚り線をヒーターに使用して、体表面に高密度に配置する事で、柔らかさと、温度分布特性を向上させています。 また、ヒーターの抵抗値で温度を検出する方法で、温度オーバーシュートの無い、安定した制御を実現しています。 実装面では、制御回路のサイズと部品点数を減らすために、制御方法と部品構成を工夫しています。  枕本来のデザインと用途を追及! 性能は期待通りで、数分で適温に達し、過熱する事もなく、温度ムラも感じられません。 問題点としては、人の形をした抱き枕を止めて、枕の形をした抱き枕を作るように、細君から、指摘を受けている事があります。 |
| アイデアの名称 |
抱き枕用温度制御装置 |
|---|---|
| 掲載した日付 |
2003年2月11日 |
| 従来の技術と改善点 |
従来から、オーバーシュートなどの、制御誤差を小さくする目的で、電熱用抵抗器の抵抗値が、温度で変化することを利用して、この抵抗器をブリッジ回路の一辺に配置し、ブリッジの平衡を保つことで、温度を一定に保つ方法が用いられていた。 しかし、一般にブリッジの非平衡によって生じる電圧は僅かであり、電熱用抵抗器に流す大きな電流によって、接地電位や、電源電圧が変動するなど、正確な検出を困難にしていた。また、ブリッジにおいて電熱用抵抗器と直列に接続される抵抗器には、加熱用の大きな電流が流れるため、大型の抵抗器を使用する必要があり、小型化や低コスト化が難しかった。 本アイデアは、平衡検出期間と、電熱用抵抗器駆動期間とを設け、検出期間に検出したブリッジの状態を記憶し、駆動期間には、検出期間に記憶した状態に対応した電流を電熱用抵抗器に供給することで、従来の問題を解決するものである。 本方法によれば、検出期間にのみブリッジ回路が構成されれば良いため、電熱用抵抗器に大きな電流が流れる駆動期間には、これと直列に接続された抵抗に電流を流さないことが可能になる。そのため、小電力の抵抗器でブリッジを構成することができ、また、検出期間にはブリッジに流れる電流が僅かであるため、接地電位や電源電圧は安定しており、平衡状態の検出も正確に行うことが出来る。 |
| アイデアのポイント |
(1)平衡検出期間と、電熱器駆動期間を設けた温度制御装置 (2)検出期間に検出したブリッジの平衡状態を記憶する温度制御装置 (3)駆動期間に、検出期間に記憶しておいた平衡状態に対応した電流を供給する温度制御装置 |
| 足と胴体 |

|
大根のように見える2本の棒状のパーツを、途中まで縫い合わせて、胴体と足を構成します。
|
|---|
| 左右の胴体の縫合 |

|
胸の部分から、股間部まで、2本の胴体を前後2箇所で縫い合わせて行きます。 |
|---|
| 首部取り付け部 |

|
首の取り付け部は、ちょうど帽子の形をしています。 |
|---|
| 仮首の取り付け |

|
首と同じ太さの紙管等をインシュロックで上の帽子型部品に取り付け、内部に硬く綿を詰めます。 |
|---|
| 首の取り付け |
 
|
左右を縫合した胴体の一端に、上で作った仮首を縫合します。 |
|---|
| 胴体カバーの縫合 |

|
胴体の前と後のカバーを縫い付けます。又の部分は、縫いにくいので、待ち針でしっかり仮止めしてから、縫います。 |
|---|
| 素体完成 |
|
MARS氏作成の抱き人形用の首をつけて、素体は完成です。本機は、全長70センチですが、60センチ用に作ったワンピを着ているので、袖が短いです。 文化人形の伝統を踏襲する高度に文化的な手足には、手のひらも指もありません。 |
|---|
| ぞんざいな髪の毛 |

|
黒色ナイロンテグスを貼り付けた、にわか作りの鬘を被っているので、見た目も、手触りも、まるでよろしくありません。 |
|---|
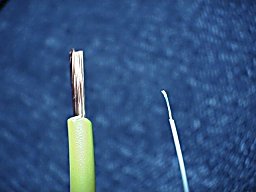
| 電熱線 |
|
電熱線が入っている事を感じさせないようにするため、被服も含めて0.5ミリの、極細の銅撚り線をヒーターに使用しています。 横に写っている通常の電線と比べると、細さが分かります。 銅線は400ppmとステンレス線の70ppmに比べて温度による抵抗の変化が大きく、温度検出が容易です。 |
|---|
| 電熱線の配線 |

|
細い線なので、布団針で胴体内部に縫い込む事ができます。1.5センチ程度の間隔で、体の各部に縫いこんで行きます。 本機では、体を、頭、右手、左手、右足、左足、胴体、の6個所に分けて温度制御するので、それぞれ、独立して配線します。 各ヒーターの抵抗値が同じになるように、6本のヒーターのすべての長さが同じになるようにします。今回は、すべて、2.4m(3.4Ω)としています。 |
|---|
| 配線方法1 |

|
電熱線が外部に露出しないように縫い込みます。 まず、針を貫通させて、電熱線を通します。 |
|---|
| 配線方法2 |

|
電熱線の出ている穴へ、針を差し込んで、縫い進めます。 足の先など、その場所で電熱線を固定する場合は、僅かに(0.3ミリ程度)異なる場所に針を差し込んで、すこしだけ電熱線を表面に出します。 |
|---|
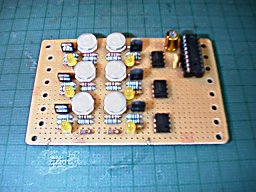
| 制御基板 |
|
パワーMOSFETとPIC16F84で製作した部品点数の少ない制御基板です。 白い部品が半固定抵抗器で、ブリッジのバランスを調整して、各セグメントの温度を設定します。 |
|---|
| 配線 |

|
各部に配置した電熱線は、首を通って頭部に配線され、制御基板に接続されます。 頭蓋の裏面には、温度分布を均一化する目的で、アルミテープを貼付しています。 |
|---|
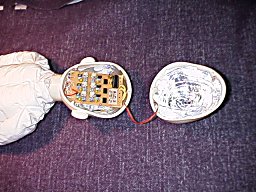
| 基板の固定 |

|
基板は頭蓋全部に固定します。基板の四隅をホットメルト接着剤で固定しているだけです。 |
|---|
| 頭蓋後部の接続 |
|
頭蓋後部にも電熱線を配線しているので、これを接続します。 この状態で常温で電源を投入し、ブリッジのバランスを取ります。その後、一定電圧のオフセットを与えると、その電圧に見合うだけ、体温が上昇します。 6つのLEDがヒーターのドライブに応じてそれぞれ、不規則に点滅して、如何にも「サイバー」って感じです。 |
|---|
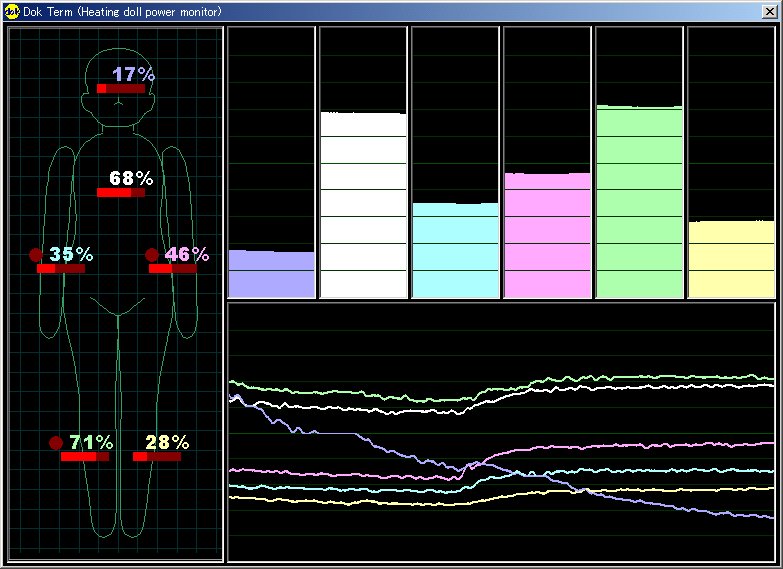
| モニタソフト(ドクターム) |
|
|---|
|
PICからRS232C信号を受信し、各ヒーターのドライブ状況を監視、記録するソフトです。 上の図では、グラフ中央部で体位が変化し、ヒーターのドライブ率が変化しています。また、頭部は次第に温度が上昇し、ドライブ率が終始下降しています。 ドライブ率は、三角窓関数と畳み込みして、プロットしています。 |
| 回路図 |
|---|
|
1セグメント分の回路図です、基板にはこの回路を6つ実装しています。(全く関係ないけど、ハード屋が部品を乗せる事を実装と呼ぶのには抵抗がありませんが、ソフト屋がソフトを組むことを、やたら「実装」と呼ぶのには反感を感じます。「コーディング」とか、「リンク」とか、工程に応じた正確な用語で呼称すべきです。実装という用語を乱発して、作業内容が曖昧になっています。ソフト屋には、愛情と正確さを期待します) ドクとその関係者はこの回路図ととその利用およびその結果について、一切の責任を負いません。 電源は万一絶縁破壊しても感電しないように5Vとしています。このため、寒い時には、9A近い電流が流れますので、電源ケーブルは太い目にする必要があります。 最大出力40W(検出期間を考慮した全セグメントの合計)ですので、寒い日でも短時間で暖かくなります。また、保温性の高い羽根布団の中でも、設定温度を逸脱する事がありません。 |
|
| PICのプログラム |
|---|
|
このプログラムは技術的参考の目的で現状あり姿のまま提供されるもので、一切の保守、サービスを行いません。 ドクとその関係者はこのプログラムとその運用およびその結果について、一切の責任を負いません。 ドクはPICのプログラムが下手なので、もっと書き方をだれか教えてください。 |
| 人形の型紙 |
|---|
|
型紙に10センチの目盛りがありますので、プリンタで印刷したら、拡大コピーで、目盛りが10センチになるように、拡大すれば、利用できます。 |

|