|
温熱布製関節人形(DMX84) |
|
|---|---|
| 概要 |
DMX89の自然な姿勢とフィーリングを活かし、これに、温熱機構を組み込みました。 DMX89には関節があるので、その部分の配線方法や材料を工夫しています。 また、温度制御は、シンプルでありながら、実用的な性能が出る方法を工夫しています。  シンプルな制御基板 耐久性の向上については、今後の様子を見る必要がありますが、構造からみて、実用的なレベルに達しているのでは、と想像します。 ←1つ戻る ←←目次へ戻る |
| 温度制御の課題 | |
|---|---|
|
ヒーターの温度を一定に保つだけでは、快適な暖かさは得られません。なぜなら、ヒーターと人形の体表の間には熱抵抗があり、周囲温度が低いと、体表の温度が下がってしまうためです。 その為、普通に抱いた時には暖かさが感じられないのに、同じ人形が、布団の中では熱くて抱いていられない、といった現象が生じます。 従来は、細いヒーターを皮膚の直下に高密度で分布させる事で熱抵抗を減らす方法や、体をいくつかの部分に分けて独立して温度を制御する事で、より高精度に温度を保つ方法を組み合わせて、この問題に対応していました。 しかし、細いヒーターは断線し易く、また、複数の部分に分けて温度制御する回路は複雑で高価になります。 そこで、ヒーターに加えている電力を常に監視し、一定の温度を保つために、より多くの電力を要している場合には、周囲に熱が吸収されていると判断して、設定温度を上げ、逆に、少ない電力で済んでいる場合には、設定温度を下げる機能を設けました。 この方法であれば、たとえば、冷え切った体で抱っこした場合等には、通常より設定温度を高くし、逆に、羽根布団の中等では、通常より設定温度が低くする事が可能になり、快適さをより高めることができます。 多分、この方法は多分電気毛布等でも採用されていると思います。 また、単純にヒーター電流を設定温度にフィードバックしたのでは、制御が発散する可能性があるので、設定温度を変化させた後、ヒーターの温度が新しい設定値に収束するまで一定の時間待ってから、ヒータに加えている電力を測定する工夫をしています。 これらの結果、1系統のチューブ型ヒーター(丈夫だが熱抵抗が大きい)を使用するだけで、普通に抱っこしても、布団の中で抱いても、快適な暖かさを得ることが出来るようになりました。 |
| アイデアの名称 | 抱き人形用の温度制御装置 |
|---|---|
| 掲載した日付 | 2003年11月16日 |
| アイデアの内容 |
温熱抱き人形(抱き枕)は、布団の中や野外といった、大きく異なる環境で使用される場合がある。従って、発熱体の温度を一定に保つ方法では、発熱体から、人形表面までの熱抵抗が存在するために、環境が変化すると表面温度が変化し、快適な暖かさが得られなかった。 本アイデアは、このような環境の違いを検出して、発熱体の設定温度を加減し、環境が変化しても、快適な表面温度を保つためのものである。 設定温度の加減は次のように行われる。まず、規定の設定温度によって、装置を起動し、発熱体の温度をその設定温度になるよう制御しつつ、その設定温度で平衡する迄待つ。設定温度で平衡したならば、現在発熱体が消費している電力を測定する。測定した電力が多ければ、設定温度を高め、少なければ、設定温度を下げる。 その後、再び新たな設定温度で平衡する迄待ち、再び発熱体の消費電力を測定して、設定温度を調節する動作を行い、これを繰り返す。 新たな設定温度の決定は、現在の設定温度と現在の消費電力で求められる適切な設定温度の表を用いて行う方法と、単に消費電力を設定温度に加える方法がある。 |
| アイデアのポイント |
(1)発熱体の消費電力によって、設定温度を変化する抱き人形用温度制御装置であって、発熱体の温度が設定温度に到達する迄待った後に、消費電力の測定を開始することを特徴とする抱き人形用温度制御装置。 (2)上の(1)において、現在の設定温度と現在の発熱体の消費電力からなる表によって、次に設定すべき温度を求める事を特徴とする抱き人形用温度制御装置。 (3)上の(1)において、現在の発熱体の消費電力に一定の値を乗じて基本の設定温度に加算して設定温度とする事を特徴とする抱き人形用温度制御装置。 |
| ヒーターの作成(1)ミシン糸を通す | |
|---|---|
|
ヒーターはシリコンチューブの中に、ステンレスワイアーと被服銅線を通して作成します。 ここでは、感触を改善するために、外径2.8ミリ、内径1.5ミリと比較的細いシリコンチューブを使用している為、チューブにワイアーを通す方法に工夫が必要です。 最初に、細い糸(ミシン糸を使用)を水の流れに乗せて、パイプを通し、次にそれに結び付けて、ワイアーを通します。 | |
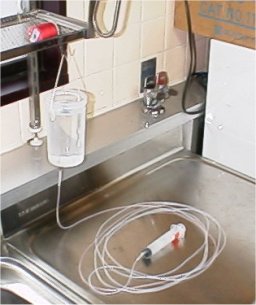 |
シリコンパイプにミシン糸を通す為に作成した治具で、シリンジと、イルリガートル(タッパーウエアの底にパイプを取りつけて作成)から出来ています。 イルリガートルの上部にある、赤いものが、ミシン糸です。 |
 |
イルリカートルの上部のミシン糸は、その中を通過して、シリコンパイプに挿入されています。 水に少量の界面活性剤を加えると、ミシン糸との馴染みが良くなります。 |
 |
シリンジを引いて水を吸引すると、流れに沿ってミシン糸がパイプの中を進みます。 シリンジを全て引いては、シリンジからパイプを外し、シリンジの中の水を出して、再びパイプを取りつけて、繰り返します。 ミシン糸が流れやすいように、手でミシン糸のボビン持って、助けてやります。また、引っかかったときは、シリコンパイプ全体を揺すってやると、動き出します。 写真は、ミシン糸が流れて、シリンジの中までやって来たところです。 |
| ヒーターの作成(2)ワイアーを通す | |
|---|---|
 | |
|
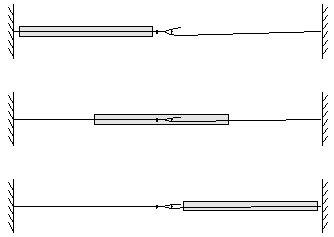
ミシン糸の一方を固定し、もう一方を環にして、ワイアーを通します。ワイアーの一方は別の場所に固定して、一直線に張ります。(上図) シリコンパイプを扱きながらワイアーの方に移動させます。(中図) シリコンパイプがワイアーを覆ったら出来あがりです。(下図) ここでは、ワイアーと、温度検出用の極細被服銅線2本を通しています。 | |
 |
完成したヒーターです。 |
 |
内径1.5ミリの細いチューブに、ワイアーと2本の被服銅線が通っています。 |
| 関節の配線 | |
|---|---|
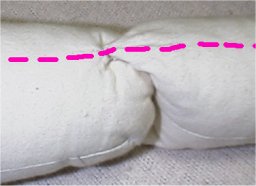 |
関節では、ヒータは点線で示すとおり、ヒンジ部を通ります。 ヒンジは関節の左右に2つあり、一方は行き、もう一方は帰りのヒーターが通過します。 |
 |
関節を開いて、裏側に僅かに露出するヒータ(丸印の中央)を示します。 |
| 制御基板 | |
|---|---|
|
|
ヒーターが1系統しかないので、制御回路は小規模です。 ヒーターを制御するMOSFETは発熱しませんが、24Vから5Vを作るレギュレーターが発熱するので、L字型のヒートシンクを取りつけています。 |
| PICのプログラム |
|---|
|
このプログラムは技術的参考の目的で現状あり姿のまま提供されるもので、一切の保守、サービスを行いません。 ドクとその関係者はこのプログラムとその運用およびその結果について、一切の責任を負いません。 |
| 回路 |
|---|
|
|
ヒーターは24ボルトで駆動し、制御系は5Vで動作しています。PICの2番ピンにPWMで設定電圧が出力されており、これが、コンデンサで平滑された、ブリッジに印加されます。 PICの12番ピンと13版ピンには同一の信号が出力され、12番ピンに接続されたLEDは、駆動状態のモニター用です。 |